Generator sizing requires an understanding of how non linear loads present a challenge to successful delivery of high quality power under all operating conditions.
Original article written by: Gregory M. Williams, P.E.
INTRODUCTION
- Generator sets are inherently a high reactance source compared to a utility.
- Nonlinear loads, not generators, cause voltage distortion.
- Generators should be sized for nonlinear loads to reduce heating and voltage waveform distortion. Oversizing to equate distortion with a utility source may not be practical.
- Nonlinear load design should include circuits to accept only timing signals from the fundamental frequency and provide some filtering of SCR commutation effects.
- Advise system component suppliers of a limited bus source.
- Advise generator set supplier of nonlinear load details (clarify input and output kV.A/kW, number of rectifier output pulses, other connected loads, etc.).
- Caterpillar SR4 Generators do not require additional filters between generator and regulator. Three phase sensing and well-filtered voltage regulators ensure voltage control and stability.
- Instrumentation may not be accurate with nonlinear loads.
- Harmonics may have adverse effects upon the power source or other loads connected to the same source.
- Generally, problems arising after the fact must be resolved within the system and equipment external to generator set.
- Conditions assuring stable operation are complex. Generator set suppliers cannot guarantee harmonic distortion values with nonlinear loads. Where loads are known to require a low distortion voltage waveform, a consultant with access to total system constants should evaluate total harmonic distortion effects and recommend filtering as required.
SUMMARY
Many electrical power applications require continuous and high quality power. Standby diesel-electric generating sets are integral parts of the solution. Standby genset sizing requires an understanding of the genset characteristics and the connected load. Nonlinear loads, including; uninterruptable power supply (UPS), variable frequency drives (VFD), adjustable speed drives (ASD), and switched mode power supplies, present a special challenge to successful delivery of high quality power under all operating conditions. Understanding how this equipment interacts is essential.
CHARACTERISTICS OF NONLINEAR LOADS
Nonlinear Load (current not proportional to voltage)
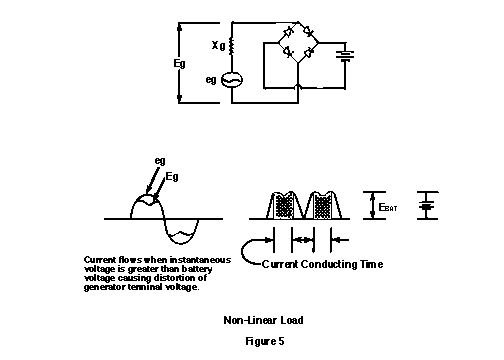
Voltage supplied to a non linear system, either by utility or generator set, is sinusoidal. For resistive and most inductive loads, current is also sinusoidal, but rectifiers charging a battery draw an almost square wave current pulse. As shown in Figure 1, AC line current will flow only when the rectified instantaneous voltage exceeds battery voltage. Original sine wave voltage from the source now becomes distorted due to voltage drop across the source impedance during the cycle portion when current is flowing.
SCR Loads
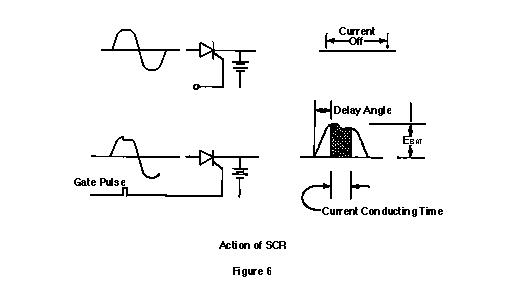
Rectifier with SCRs for output voltage and current control are often used in loads such as static UPS systems. With an SCR, current is maintained at zero until the SCR is gated “on” as shown in Figure 2. Current to the SCR at “turn on” causes a higher than normal voltage drop across the generator source impedance.
Nothching Phenomenon
In a three-phase rectifier circuit, current is switched on by SCRs consecutively. Once switched on, an SCR conducts only during the time when its particular phase voltage is more positive than the other two-phase voltages. In practice, SCR turn on is delayed to regulate output and does not occur until the oncoming phase voltage is significantly higher than preceding conducting phase voltage. Due to inductance in the SCR source circuit, current cannot build up instantly in the oncoming phase nor can it decay instantly in preceding conducting phase.
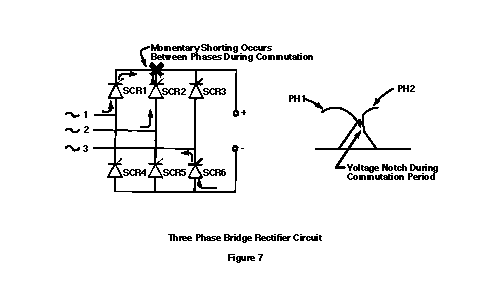
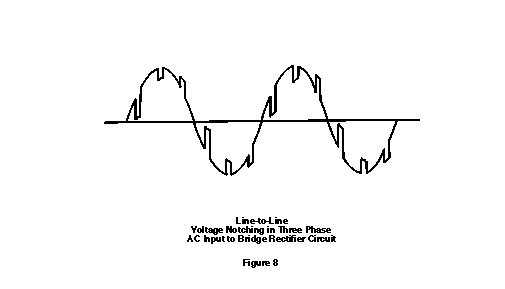
In Figure 3, when the more positive oncoming Phase 2 with SCR-2 is gated on, there is momentary line-to-line shorting action with Phase 1, which has SCR-1 in the decaying conducting mode. The resulting short is of very short duration, but produces a notch in input voltage waves 1 and Notch width and depth during this commutation period are dependent upon supply system impedances, SCR firing angle, and load current. With a three-phase bridge, there are six line-to-line notches per cycle as shown in Figure 4.
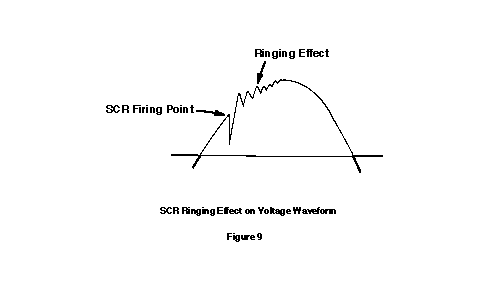
Ringing Effects
A secondary phenomenon caused by the rapid switching of SCRs is ringing effect. Ringing is a high frequency oscillation following sudden “turn on” of an SCR as shown in Figure 5. It is the result of high frequency resonance occurring in the rectifier source circuit due to inherent inductance and capacitance in the circuit elements. Notching and ringing effects can result in severe voltage waveform distortion.
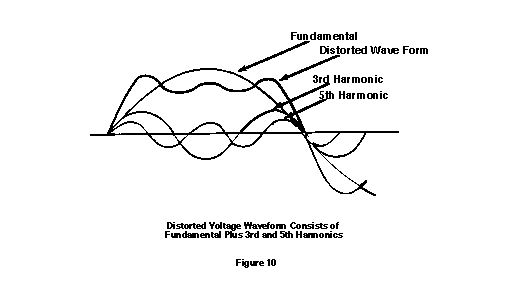
Harmonic Current
The rectifier, because it draws nonsinusoidal current from its source, along with notching and ringing effects, introduces distortion to the voltage wave from the source. This is called harmonic distortion. According to theories of waveform analysis, cyclical waveform is made up of components consisting of fundamental sine wave plus other sine waves, called harmonics, which are multiples of the fundamental frequency. Figure 6 shows separation of a distorted waveform into its component parts. The nonlinear source, therefore, does not see distorted current waveform as a single waveform, but as multiple, fundamental plus harmonic, waves. Harmonics may have adverse effects upon the power source or other loads connected to the same source. It is important to note loads drawing harmonic currents cause voltage distortion at the source, the source does not produce the harmonic distortion.
CONSEQUENCES OF NONLINEAR LOADS
Waveform Distortion
Voltage waveform distortion magnitude caused by the nonlinear current demand of the rectifer/charger is a function of the source impedance. Source impedance is not an easily defined value because generator reactance varies with time following a sudden load change. Generator subtransient reactance (X”d) and subtransient short circuit time constant (T”d) are primary parameters influencing distortion during the short SCR commutation period. A standby generator is characteristically of higher impedance than transformers. Significant differences in kVA ratings of the two sources often contributes to greater impedance differences. Facility source transformers are frequently sized to carry the total facility load. Standby gensets are often only sized to carry emergency or critical loads. Generators may have 5 to 100 times greater subtransient reactance than normal source transformers. Consequently, nonlinear loads may work fine on utility, but may react entirely different when powered by a generator set. Using an oversize generator to reduce reactance may be of some benefit. However, to obtain a significant reduction in reactance is not economically feasible. Doubling generator rating will reduce reactance by one-half.
Damping with other loads reduces effective bus reactance. Motors, in particular, act as absorbers of momentary voltage irregularities and reduce harmonic content on the line. Typically, computer room support functions such as HVAC systems, chilled water systems, fire protection systems, and room lighting must also be connected to the standby generator set. These support systems are often as large as or larger than the nonlinear load. It is frequently very desirable for system operation and distribution reasons to have small, three phase, continuously running air handler motors in the computer and UPS room sharing a common feeder or power transformer with the UPS.
Resistive loads are effective in minimizing waveform distortion caused by ringing effect. Resistance acts as a oscillation damper in a resonant circuit. Adding a resistance load is one technique used to minimize waveform distortion caused by system oscillation. This, however, is only effective if high frequency oscillations are the cause of a problem. If a resistance element is added strictly for treatment purposes, adding a capacitor in series with the resistor will reduce fundamental current with minimum effect on high frequency damping. It is theoretically possible to add a low pass filter to the generator output for attenuation of prevailing harmonics. However, it should be a last resort consideration. Practical tuned circuit filters generally represent compromise and may introduce more problems than they solve. Component size and expense are also limiting factors. A better approach is to specify or add filtering or other harmonic attenuating options such as isolation transformers at the distortion source. Consultation with the device suppler usually reveals such options are available.
Power Factor
Generators are rated for 0.8 power factor. Connected loads may have a lower power factor. Displacement of current with respect to voltage occurs with rectifier phase control. Line power factor can vary depending upon SCR conduction angle. Compounding this are the high frequency harmonic currents which primarily result in added kVArs. Consult with the device supplier for specific input kVA and power factor.
Generator Heating
Harmonic currents produce high frequency flux change and, cause heating in stator cores. Rotor losses also occur because harmonic currents in the stator will induce currents in the pole faces and amortisseur windings. Higher magnetic core temperatures result in a higher winding temperature. Generator stator heating is also a function of I2R loss. Winding heating is proportional to effective or RMS current squared. RMS current for a sinusoid wave is 1.11 times the average value. The RMS value of the distorted SCR circuit input current waveform is typically greater than 1.11 times average current. (see further discussion of instrument readings). Derating or using a low temperature rise generator is a means of compensating for increased heat losses and possibilities of reduced power factor.
Generator Automatic Voltage Regulator And Excitation
Voltage regulators must control output voltage of the generator in spite of the load causing a distorted wave shape. Various techniques can be used to accomplish this task. Three-phase sensing minimizes effects of waveform distortion by providing an average of all three phases at any given instant. Since SCRs in three-phase rectifier loads do not all “gate on” at the same instant, a minimized distortion, average signal of the three phases is processed. In comparison, a single phase-sensing regulator will sense severe distortion occurring at a given instant during the cycle in one phase. Caterpillar SR 4 Generators have three-phase sensing network with a floating neutral as a standard feature, thus, voltage disturbance in any one phase will shift the neutral, but not appreciably effect voltage to the regulator. Waveform notching is effectively blocked from the regulator.
Regulator circuits must include features to isolate field power control from distortion effects. If SCRs are used within the regulator, circuits must be used to prevent the distortion from load SCRs interfering with triggering of regulator SCRs.
Generator field power must be filtered to minimize interaction with load distortion load. A well-filtered regulator combined with inherent inductive filtering of a brushless design generator virtually eliminates this problem. The Caterpillar SR 4 self-excited Generator has a well filtered regulator and excitation system providing voltage control and stability of equivalent quality obtainable with a permanent magnet pilot exciter. It is also fully capable of sustaining excitation during short circuit periods occurring while load SCRs commutation without the excitation sustaining options benefit. A permanent magnet exciter, while capable of sustaining excitation during a sustained fault condition, has no advantage in providing excitation during the short duration of load SCR commutation. Additional regulator filters or optional features are not required with Caterpillar SR4 Generators for UPS applications.
Instrument Readings
Common instrumentation used in electric power generation is characterized by waveform distortion error. Measurement of AC current and voltage is standardized on the basis of root-mean-square (RMS) value, but departure from a sine wave may introduce significant error in many instruments.
Accuracy of moving iron-type voltmeters and ammeters, commonly used on generator set panels and switchboards, is generally limited to commercial power frequencies. These are RMS responding meters, however, high frequency
harmonics may produce eddy current, hysteresis, and inductive reactance effects which can cause indication errors of as much as 40%.
Test instruments, such as volt-ohm meters and clamp-on meters, are frequently rectifer-type meters responding to average values, but indicate RMS value. These instruments are calibrated to indicate RMS values based on a multiplier of 1.11 times average value. The multiplier 1.11 will not hold true if the AC input deviates from a sine wave and error will exist in the instrument indication.
True RMS ammeters and voltmeters employing nonlinear converting circuits are available on the market in switchboard cases at a premium cost. These should be capable of at least 5:1 peak to RMS ratio to ensure accuracy.
Confusion as to exactly what a meter is reading is compounded today by the advent of integrated circuit technology applied to instruments. These may be average, RMS, or peak responding and readings on various AC waveforms depend upon measuring circuit and readout calibration techniques.
Frequency meters for electric power service have requisite needs to cover only a narrow band on either side of normal system frequency. Some types are not materially affected by harmonic waveform or erroneous zero crossings while others give incorrect or erratic readings. Vibrating read-type meters are relatively free from the nonsinusoidal waveforms influence while the dial-type meters common to generator set panels are sometimes very erratic. A simple low pass filter will usually ensure accurate reading. Generator set frequency can also be determined by observing engine speed. A four-pole synchronous generator driven at 1800 rpm will always produce a 60 Hz fundamental or likewise at 1500 rpm will always produce a 50 Hz fundamental.
Instability Of SCR Controls
It is possible waveform distortion caused by an SCR system may not be tolerable to its control. This is not unusual for equipment that did not include considerations for a “limited bus” or high impedance source in its original design. It is, therefore, very important to advise the control supplier of the existence of a standby generator set as a potential power source. He is in the best position to suggest and recommend features in the planning stage to assure proper functioning of his equipment.
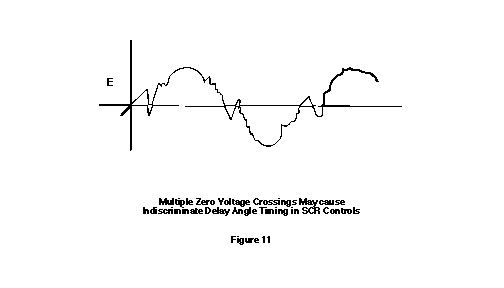
The SCR must be triggered on to begin conduction. Output of a rectifer/charger is controlled by varying the ratio of “on” time to “off” time. This is achieved by phase angle control, where delay angle before triggering as shown on Figure 6 is timed from the start of each half cycle or zero crossover. When the waveform is distorted, as shown in Figure 7, zero crossover may move or there may be several zero crossings, causing erratic firing from one cycle to the next. Timing circuits must be designed to respond only to the 50 or 60 Hz fundamental output of the generator set. Filtering of the trigger circuits is possible and should be included by the rectifier manufacturer in original design. Addition of filtering “after the fact” should not be undertaken without contacting the equipment manufacturer. These circuits are extremely phase sensitive and filter circuits usually introduce phase shift.
Some UPS systems are also equipped with over/under frequency relays which may respond to a distorted waveform and cause systems to reject the input source even though fundamental frequency is within tolerance. Filtering the sensing signal to these relays may correct this problem.
Impact On Other Loads
Most electrical devices and equipment will operate relatively unaffected when powered by generator sets with nonlinear loads. However, knowledge of potentially sensitive devices may be of value in system planning. Many
electronic devices contain internal AC to DC power planning. Many electronic devices contain internal AC to DC power supplies with adequate filtering and are relatively immune to waveform distortion. A few special purpose
electronic or control devices that depend upon source voltage “zero crossings” for timing may perform erractically. If these devices are of low power, a simple and low cost filter will usually eliminate any problem. Caution must be exercised where power factor correction capacitors are used. A resonant condition at one of the harmonic frequencies with some part of the line inductance such as a transformer, on-line motor, or the generator is possible. Excessive and possibly damaging currents at the harmonic frequency can flow through the equipment. Power factor correction capacitors are used primarily for economic reasons; however, they can also be effective in reducing waveform distortion. It may be advisable to keep them off the line until effects of operating on an emergency generator set with nonlinear loads can be observed.
As mentioned earlier, three-phase motors connected to the same supply lines as an SCR-controlled load dampen harmonics. Some harmonic energy is absorbed by the motors as heat. An observable effect might be higher than normal temperature rise. A filter or power factor correction capacitors to attenuate harmonic current may be required if temperature rise is excessive.
Regulating devices, such as battery chargers, voltage regulators, automatic speed controls, and engine governors with “closed loop” controls which typically have a reference, error detector, and error correction elements may be susceptible to instability or self-oscillation. This problem is not frequent, but may occur where response times coincide and create oscillatory response between equipment. Altering time constants of one of the controls systems will usually correct the problem.
Another effect of harmonic waveforms is EMI/RFI noise induced into low level signal circuits such as carrier current, telephone, and electronic engine governors. Basic practices of using shielded wire, good grounding techniques, physical generation, and/or avoiding parallel runs between power loads and signal leads will minimize these problems. Nonlinear specifications must ensure compliance with federal regulations concerning EMI.
Determining Distortion
A review of the entire generator set distribution system should be made to determine if loads exist which require a source with low distortion waveform. Unless the generator set system is large, it is quite common for other loads to share a common bus with the nonlinear load. If distortionsensitive loads are suspected, a consultant or distribution system designer with knowledge where harmonic distortion might be adverse and how to avoid it should be contacted. Calculating total harmonic distortion at a point in the distribution system requires a consultant to have access to system data such as: subtransient reactance, generator kVA rating, other rotating machines, reactances, resistances of transformer, cables, and other circuit elements as well as characteristics of the nonlinear, distortion-producing devices.
Harmonics present in the rectifier system are a function of the number of pulses per cycle. Harmonics of the order np +1 will be present where n equals the order of harmonic and p equals number of pulses per cycle.
| n | ||||||||
| p | 5 | 7 | 11 | 13 | 17 | 19 | 23 | 25 |
| 6 | x | x | x | x | x | x | x | x |
| 12 | x | x | x | x |
As shown in harmonics table above, (Figure 8), the greater number of pulses from the rectifier, the fewer harmonics. Harmonic amplitude also diminishes with harmonic order. Harmonic orders greater than shown on the chart are generally sufficiently attenuated to be inconsequential.
Predetermining exact content and magnitude of harmonics is extremely difficult due to the number of elements and devices within a system which may be either a source of harmonics or may absorb harmonics. The magnitudes of the various harmonics are dependent upon the site specific nonlinear load characteristics, system reactances (lines and transformers), and the exact connection of the system. The generator set supplier can provide generator subtransient reactance values, but they cannot guarantee a value of harmonic distortion with a nonlinear load.